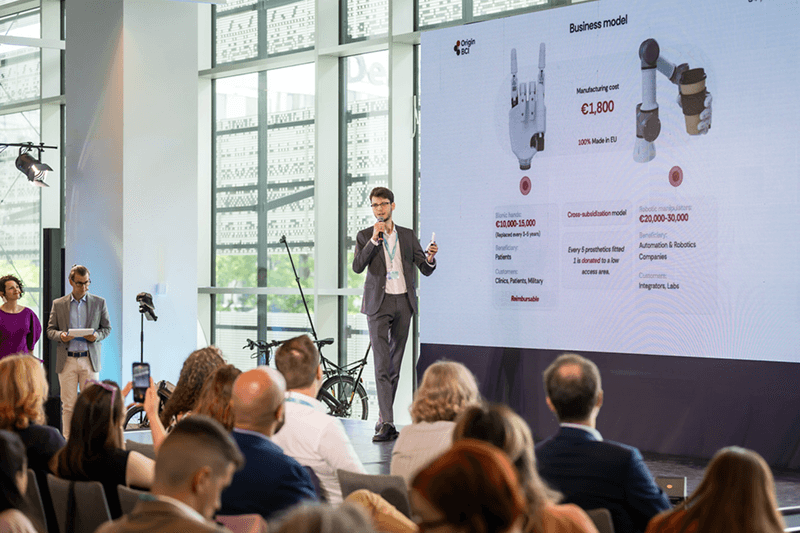
Origin BCI won the Innovation Champion Award at re:Mark 2026, Budapest!
We have some incredible news to share, and we are still catching our breath. Last week in Budapest, Origin BCI... read more.
We have some incredible news to share, and we are still catching our breath. Last week in Budapest, Origin BCI... read more.
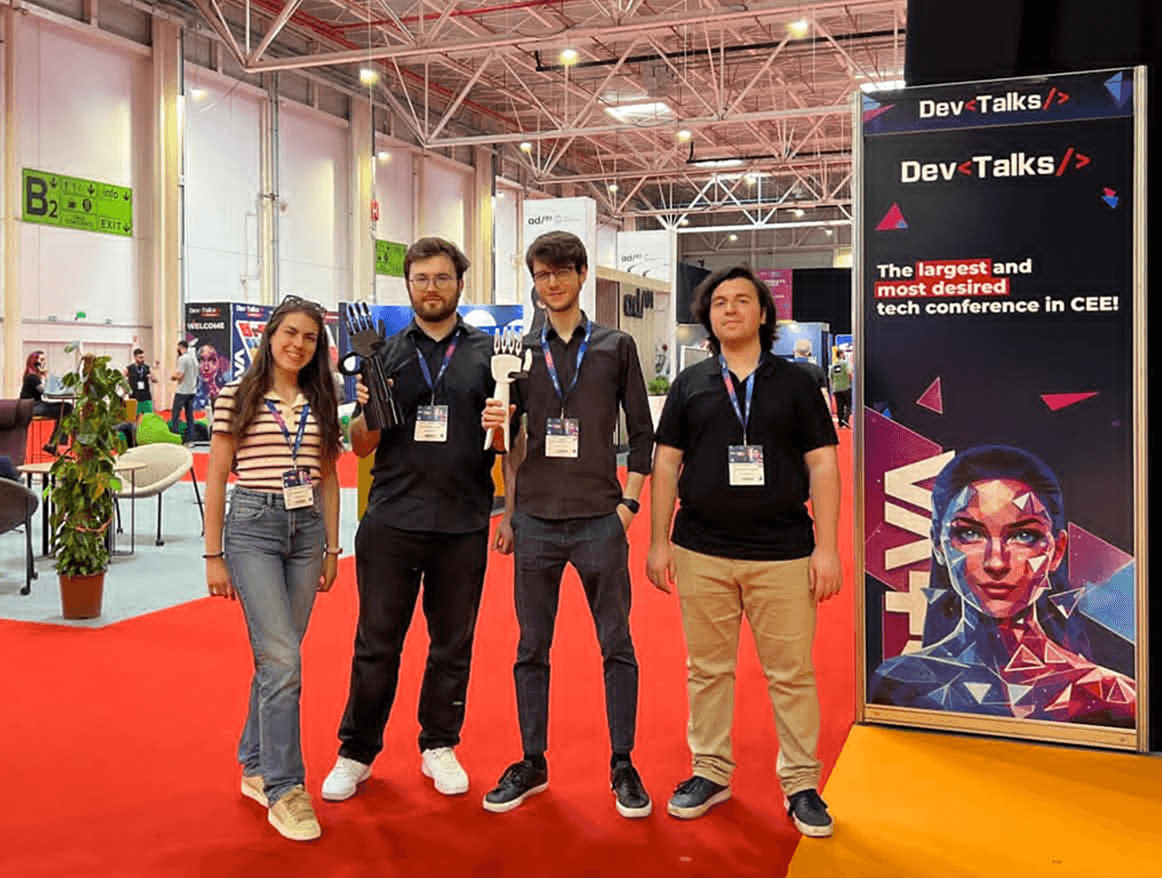
We recently had the pleasure of attending DevTalks 2026, and it was genuinely one of the highlights... read more.

We have some amazing news to share! Last week, Origin BCI took home the win at the pitch competition held... read more.
We recently spent such a great time with the team at Ortotech Clinic... read more.

We are excited to share that Origin has been nominated for Best Deep Tech Romanian... read more.

We are excited to share that Origin BCI has been featured in an article on Launch Romania... read more.
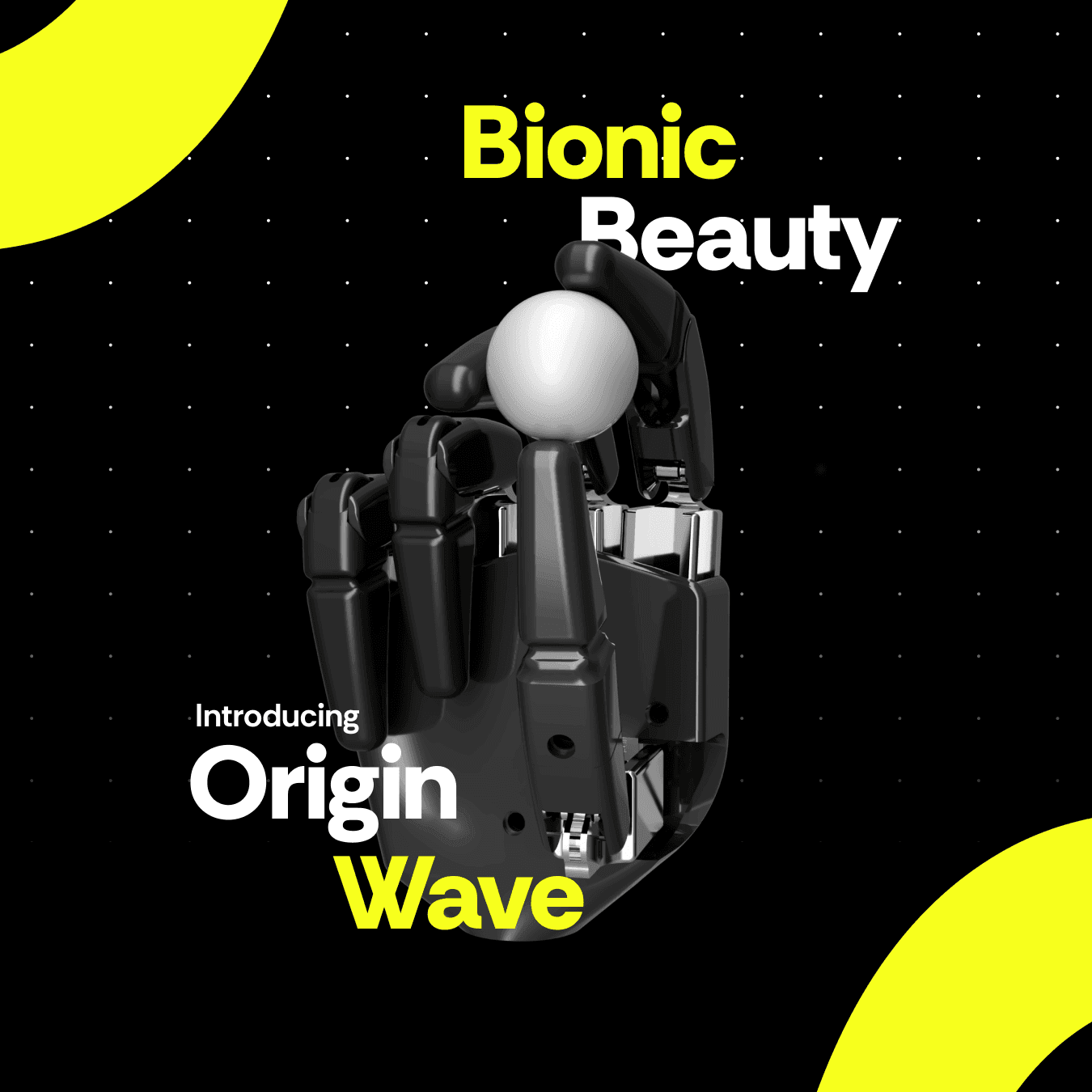
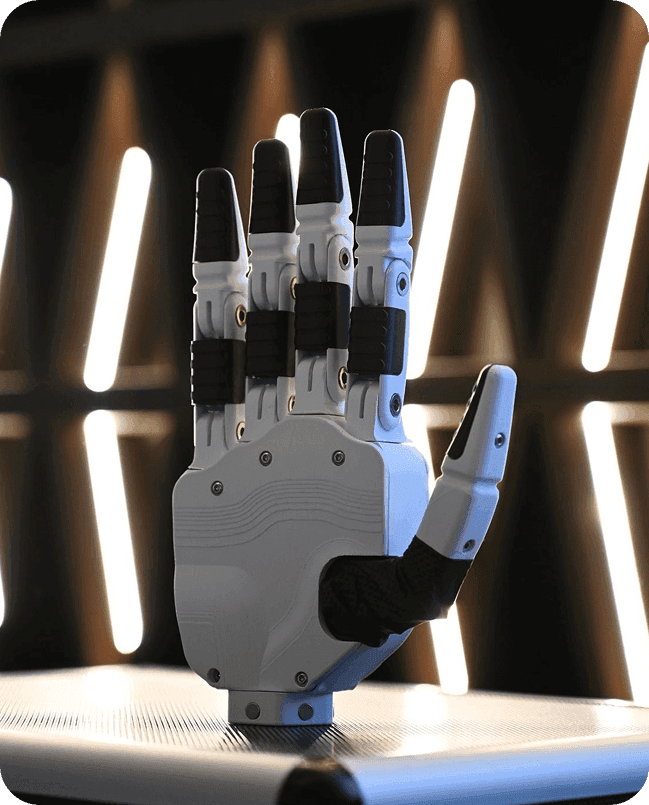
We are thrilled to unveil Origin Wave, our next-generation prosthetic hand that redefines... read more.

We are thrilled to announce that Origin BCI has been accepted into the Marc Impact Network Network... read more.

You can learn about the Origin of our company, the process of getting to where we are... read more.
This year we were very happy to be part of the How to Web Conference 2025... read more.
The latest version of our bionic hand is now complete... read more.
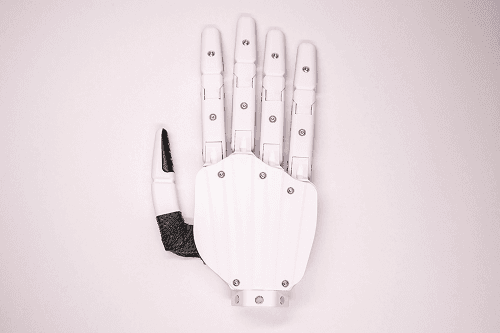
After one and a half years of development and iteration, our fifth prototype... read more.

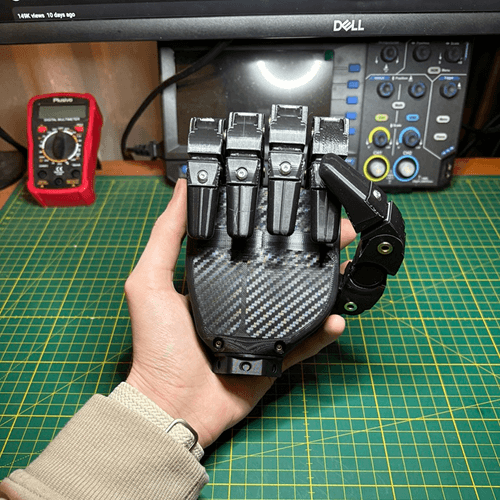
Our third prototype, marked a major step forward. It was the first time we successfully linked muscle... read more.
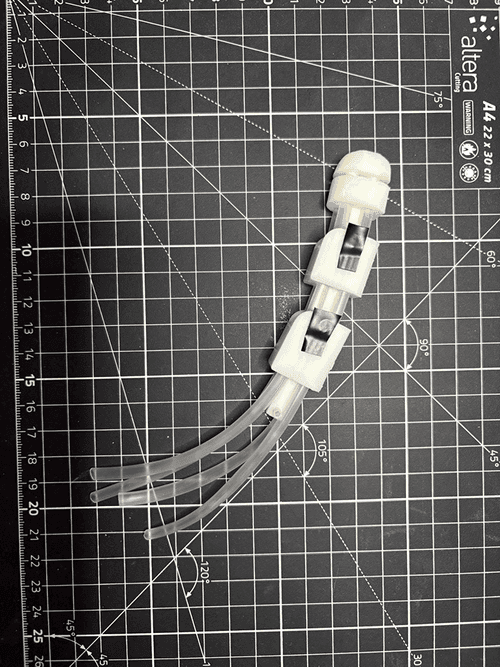
Back in 2023, we built our very first prototype: a single finger driven by a custom hydraulic concept... read more.